




GeoSLAM多平台移动扫描仪改装移动车载扫描系统产品介绍
1. 背景
移动激光扫描系统代表移动测量系统的最新发展趋势,在基础测绘和大规模城市场景的三维重建中具有越来越明显的优势。现如今国内外移动激光扫描系统发展已相对成熟,产品类型主要有:车载式移动激光扫描系统、背包式移动激光扫描系统、无人机载式移动激光扫描系统、机载式移动激光扫描系统以及船载式移动激光扫描系统等。移动激光扫描系统通常都由以下几个设备组成:激光扫描仪,导航系统(全球卫星导航系统,惯导系统),里程计,高分辨率的相机,以及计算机控制系统等,且设备组成之间还需经过严格的校准场进行校准标定后才可投入使用。
移动扫描系统的优势与传统的机架式扫描仪(TLS)相比,移动扫描设备可以更好的涵盖扫描范围以及加速工作流程,这也意味着可以减少服务供应商在现场的工作时间,并减低扫描成本。但传统的移动扫描系统也存在一定的弊端,常见的移动测量系统通常是基于车载或无人机载等运动载体的测量系统,须绝对依赖于全球卫星导航系统(GNSS)的授时和定位,主要适用于室外露天环境扫描,无法满足在封闭无GPS卫星信号的环境中长时间连续作业。机架式三维激光扫描仪不需要GPS辅助定位,可用于室内及室外环境扫描,但复杂空间需要大量换站,再进行测站点云拼接,采集效率十分低下。
基于SLAM技术的新型移动扫描系统可以有效的解决传统移动扫描系统在复杂环境中测量的弊端,SLAM扫描仪技术完全不依托GPS信号辅助定位,能够对室内及室外环境进行连续移动扫描。因此,SLAM技术在测绘领域中的应用降低了测量复杂性,不需要大量标记地物点,适用于在室内室外场景,对于解决现阶段复杂封闭空间的定位及场景重建具有广阔前景。
2. 基于SLAM技术的新型移动扫描系统
SLAM是Simultaneous localization and mapping缩写,意为“同步定位与建图”。SLAM问题可以描述为: 扫描仪在未知环境中从一个未知位置开始移动,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现扫描仪的自主定位和导航。
SLAM技术是激光扫描仪的运动轨迹是一条与工作人员行走的步态有关的非线性和高动态的曲线。按照一般的理解,激光扫描仪如果安装在移动测量系统中,一定要有一个高精度的定位系统(POS系统)与之匹配,这样,激光扫描仪得到的激光点才能得到对应的位置和姿态数据,进而合成三维的激光点云。为了能解算出激光点云数据的高动态非线性位姿,通过研究激光点云的处理算法,可从这些杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算扫描仪的位置和姿态。这种高精度的动态反向解算位置和姿态的方法颠覆了传统的测绘方法,为测绘技术开拓了一种新的思路。
由于SLAM扫描系统无需GNSS信号,对工作环境又有极强的适应性,基于SLAM技术的移动测量系统在多个测绘领域发挥着重要作用,具体表现为:
(1) 外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2) 内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3) 操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。
(4) SLAM技术的测绘移动测量扫描仪在任意环境中长时间工作故障率低,对于精度要求较高的重点区域,可与固定测站式三维激光系统配合使用,既能保证精度,又能保证效率。
3. GeoSLAM 多平台移动扫描仪简介
GeoSLAM公司成立于2012年,总部设在英国,是澳大利亚联邦科学与工业研究组织(CSIRO)和3D Laser Mapping公司的合资企业。
CSIRO是Wi-Fi的发明者,拥有权威的底层研发专利技术,是无线信号传输的先驱及奠基者。
3D Laser Mapping是英国的一家专注提供LiDAR解决方案的公司,是移动测量及街景地图的发明者。
GeoSLAM公司自成立至今,已积累近10年的研发到生产实践经验,产品应用领域几乎覆盖所有测量相关专业。目前,GeoSLAM公司及产品已是3D地理空间移动测量技术解决方案的全球市场领导者,其产品遍布全球53个国家,拥有77个分销商,全球设有5个办事处。
3.1 GeoSLAM系列产品优势
GeoSLAM公司以“物尽其用”的产品研发定位理念为核心,并始终坚持这一核心理念不断创新发展,产品已成为当今国内外最受欢迎的多平台移动扫描系统之一,它可支持手持式移动扫描,背负式移动扫描,伸长杆式移动扫描,无人船载式移动扫描,车载式移动扫描,无人机载式移动扫描及倒挂吊舱式移动扫描等众多平台搭载模式。

GeoSLAM扫描仪一机多平台搭载模式

GeoSLAM扫描仪手持方式搭载扫描建筑室内

GeoSLAM点云,轨迹,影像叠加

任意点击轨迹文件位置可自动弹出该点对应的影像文件
当需要对街道地物要素测量时,可将系统作为车载方式进行移动扫描。

GeoSLAM扫描仪车载方式搭载
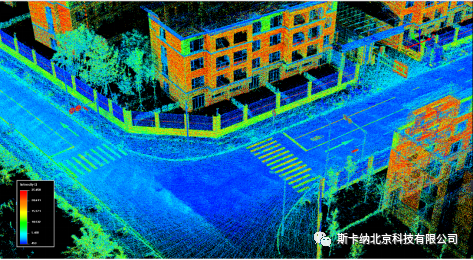
GeoSLAM扫描仪车载方式搭载扫描成果

GeoSLAM扫描仪车载方式搭载扫描成果

GeoSLAM扫描仪升级改装为移动激光全景扫描仪

GeoSLAM扫描仪升级改装为移动激光全景扫描仪全景影像成果

GeoSLAM扫描仪升级改装为移动激光全景扫描仪全景影像与点云叠加成果

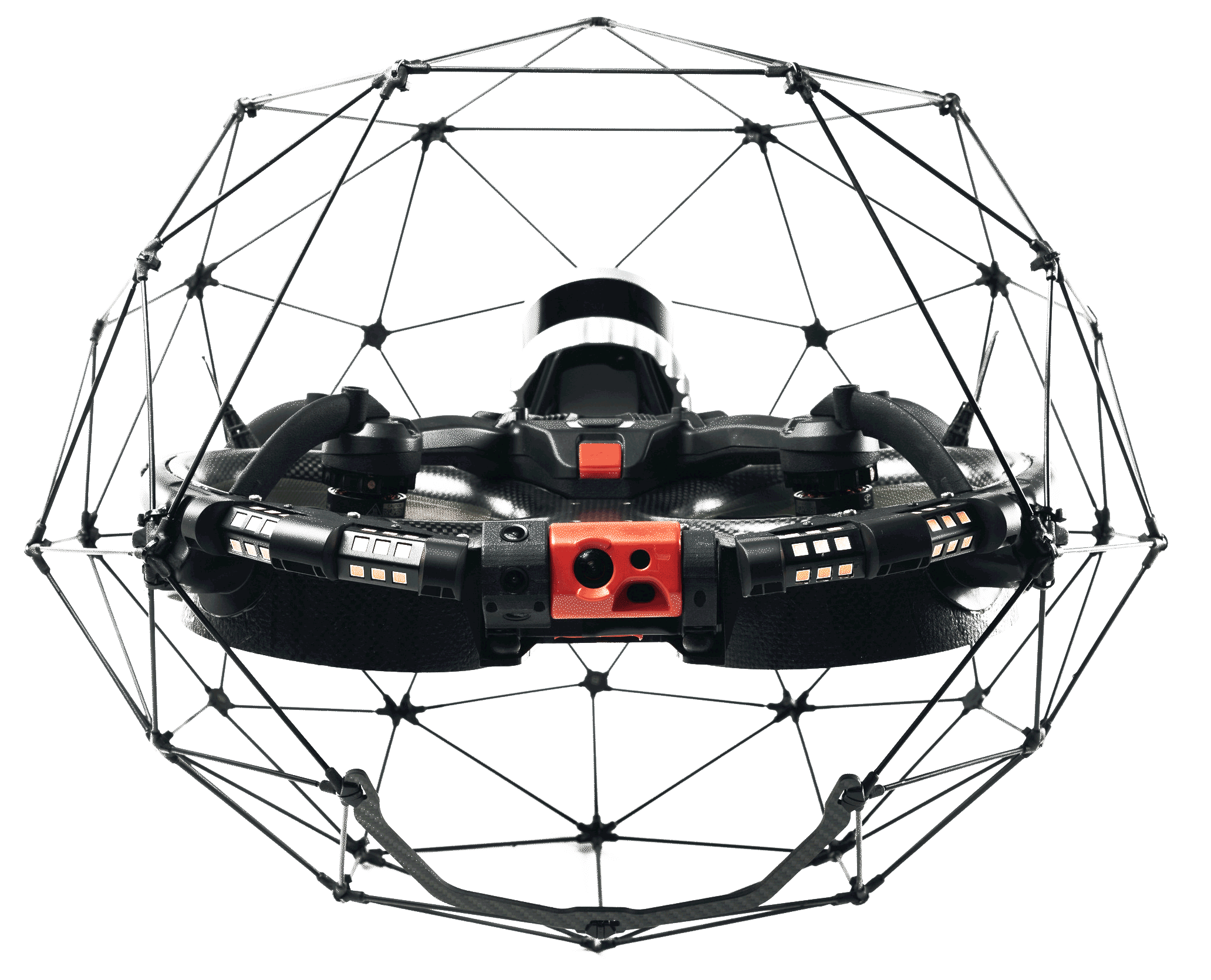
GeoSLAM扫描仪无人机载方式搭载

GeoSLAM扫描仪无人机载方式搭载大型料场测方扫描成果

GeoSLAM扫描仪无人机载方式搭载林业扫描单木分割成果
3.2 GeoSLAM ZEB-HORIZON扫描仪介绍
GeoSLAM ZEB-HORIZON型号扫描仪是目前性价比较高的一款扫描仪。也是GeoSLAM产品系列里测程最远,点密度最高,使用搭载平台模式最多的一款设备。

GeoSLAM ZEB-HORIZON扫描仪一个背包即可全部装下
产品硬件技术参数:
•激光头仅重1.3Kg,全套设备重量小于2.9kg;
•激光扫描距离:100米;
•激光头每秒钟可发射300000点/秒;
•测量精度:相对精度1-3㎝;绝对精度:3-10㎝;
•激光头自动360°旋转式扫描,沿行走路径球状维度发射激光束,可确保在任何位置单位时间内都可实现全景扫描,保证数据采集的完整性;
•扫描续航时间:电池为符合航空托运标准的90WH锂电池,单块电池可连续扫描4小时,配置2块电池可完全满足1整天的工作需求;
•防护等级:IP54;
•工作温度:-20°-50°;
•存储空间:120GB存储空间,存储自动循环覆盖,无需清理;
•结构设计小巧,可进入低矮及狭小空间进行数据采集;
•支持手持、伸长杆、背负、车载、船载、无人机载等多种平台搭载方式扫描。
数据处理软件特性:
•软件兼容性:软件与硬件为同一生产厂家,保证了软硬件的兼容性,且软件为联网登录激活,可随时异地登录,方便管理;
•软件参数设置:软件可以调整数据处理参数,根据外业环境调整收敛值、像素大小、裁剪框大小,惯导信息权重,扫描线路是否闭合等参数;
•多任务处理:软件内,可同时处理多个任务,可实现两次或两次以上不同任务的点云数据拼接,并输出数据;
•数据输出:软件可一键设置点云取样率,渲染方式,噪声滤除等操作,并输出*.LAZ,*.LAS,*.PLY,*.E57等格式;
•数据展示:软件可实现2D平面预览和3D点云漫游,2D平面可根据高差自动分层显示;
•信息查看:软件可查看外业扫描轨迹信息,如有影像数据可在特定位置查看影像信息;
•数据着色显示:软件可以通过影像视频对点云数据进行着色;
•地理坐标转换:软件自动解算数据并可自动识别基准标定板测量的控制点坐标,并进行坐标转换及精度检核;
•数据处理:对原始数据进行后期处理,可快速生成平、立、剖面的正摄影像图;并可进行点云角度测量、长度测量、面积计算及尺寸标注等功能;
•正射影像图:软件可基于点云创建带坐标的大幅正摄影像,可直接在CAD中进行加载;
•照片匹配:可将高分辨的照片匹配到平/立剖面图上;
•平整度检测:可实现对点云的平整度检测功能;
•点云展开:可实现对柱形、弧形及多边形点云结构的展开,并生成可直接在CAD中加载的正射影像图;
•虚拟全景:利用车载、手持、无人机点云数据可生成虚拟全景图。
四、GeoSLAM ZEB-HORIZON改装移动车载扫描系统优势介绍

GeoSLAM ZEB-HORIZON改装移动车载扫描系统安装
测量概况:
▲车载支架及扫描系统安装仅需2分钟完成;吸盘式车载支架,方便快速安装及拆卸;
▲扫描系统启动至数据采集仅需1分钟完成;
▲测区范围内无需架设GPS基站,扫描系统全程无GPS信号输入;
▲本次采集为连续采集,测量长度约为1300m的市区街道以及单个地下车库,采集平均车速约10km/h,采集时间约为15分钟;
▲仅用1台笔记本电脑现场30分钟完成数据解算;
▲RTK现场测量控制点及检核点坐标,并对数据进行绝对坐标转换,经验证点云数据高程及平面精度均优于10cm;
▲对于市区及地下车库遮挡区域,可将扫描系统从车载V型卡口上快速拆卸下来,进行手持移动补扫。

GeoSLAM ZEB-HORIZON改装移动车载扫描系统

市区街道移动采集

地下车库采集
联系人:韩经理 联系电话:13810595820

联系人:李经理 联系电话:15331663599


- 2019-10-23
- 2020-06-16
- 2020-03-03
- 2019-12-31
- 2020-04-01
- 2024-11-12

