




某铜矿1#溜井三维激光扫描报告

待扫描 1#溜井现场
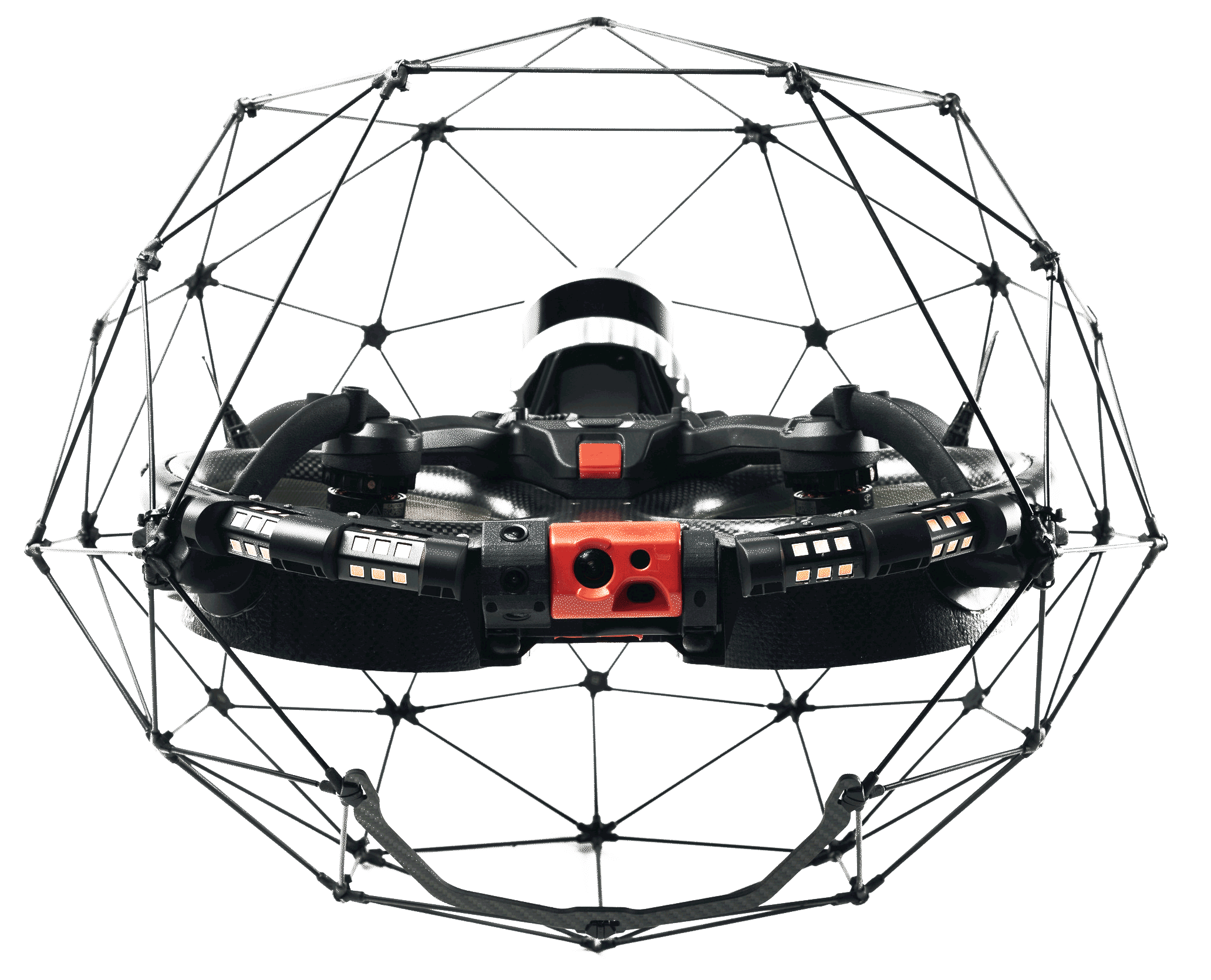
本次扫描采用 ZEB-HORIZON 便携式三维激光扫描仪,和传统的激光扫描技术相比,使用这套设备无需进行复杂的初始定位、整平、放置标靶等多项准备工作,且测量过程中允许设备旋转和各种不规则移动,极大地提升了扫描效率。

|
量程 |
100m |
|
量角 |
270°×360° |
|
分辨率 |
0.625° |
|
数采率 |
30 0000 points/s |
|
距离精度 |
±30mm |
|
激光等级 |
一级(对人眼无害,21CFR 1040.10 & 1040.11) |
|
波长 |
905nm |
|
工作环境 |
0℃~50℃ 湿度<85% |
|
供电 |
12VDC±10% 1.5A |
|
重量 |
探头:1kg |
|
附件总重:4.1kg |
|
|
尺寸 |
探头:80×113×140mm 附件:470×220×180mm |
|
电池 |
可持续使用 4 小时 |
表 1:详细技术参数

在本次扫描工作中,使用 ZEB-HORIZON 扫描仪,配合设备保护外壳、保护平台、全景相机、自动光源、绞盘等,组成矿用溜井三维扫描系统。将 ZEB-HORIZON扫描仪装配在设备保护外壳内,再用钢丝绳连接固定扫描仪,通过绞盘将扫描仪下放到溜井中,在下放过程中扫描仪实时扫描溜井内部情况。当扫描仪下放到距离井底 10 米处,即可将其逐渐提升,当扫描仪到达井口,即可读取扫描数据并关机,同时停止全景相机的视频录制,由此完成整个溜井的扫描工作。
矿方和扫描仪工程师对接后,通过固定滑轮人工放线下吊设备的方式,对1#溜井开展扫描测量工作。

|
扫描现场 |
扫描时间 |
|
1#溜井井筒内壁 |
2021.05.29 |
|
1#溜井井口坐标区域 |
2021.05.30 |
溜井现场扫描时间表
通过两天的扫描工作,完整的收集到了1#溜井井口坐标定位区域和各个深度水平的点云数据,通过远程中心的原始数据解算,以及对初始点云降噪、灰度渲染等处理,得到 1#溜井的三维点云模型如下图:

1#溜井整体点云模型

1#溜井井筒内部视角
根据矿方现场提供的控制点坐标,在 HUB 软件里面将点云模型直接进行坐标转换,使溜井模型和矿区其他建筑物处于同一坐标系统:

坐标转换结果显示,本次坐标关联的中误差为0.022m,满足矿方精度要求。将两个点云模型进行拼接处理,从而实现整个井筒点云坐标统一化,方便后续数据和图纸的转换衔接。

1#溜井灰度点云模型(带绝对坐标)
基于上述现场扫描及解算处理得到的溜井三维点云数据,经过点云抽稀、简化、封装等处理,建立对应的溜井扫描实体模型如下图所示:

1#溜井实体模型
通过对点云模型的细致观察和对比可以看到,+3865 标高至+3800 标高溜井内壁被下放的矿石冲刷破损较为严重,而溜井下部内部现状情况较好,井筒内壁未发现明显渗水和较大面积的破损现象,井壁较为规则,没有检测到较大变形及位移。
联系人:韩经理 联系电话:13810595820

联系人:李经理 联系电话:13811146746


- 2019-10-23
- 2020-06-16
- 2020-03-03
- 2019-12-31
- 2020-04-01
- 2024-11-12

