
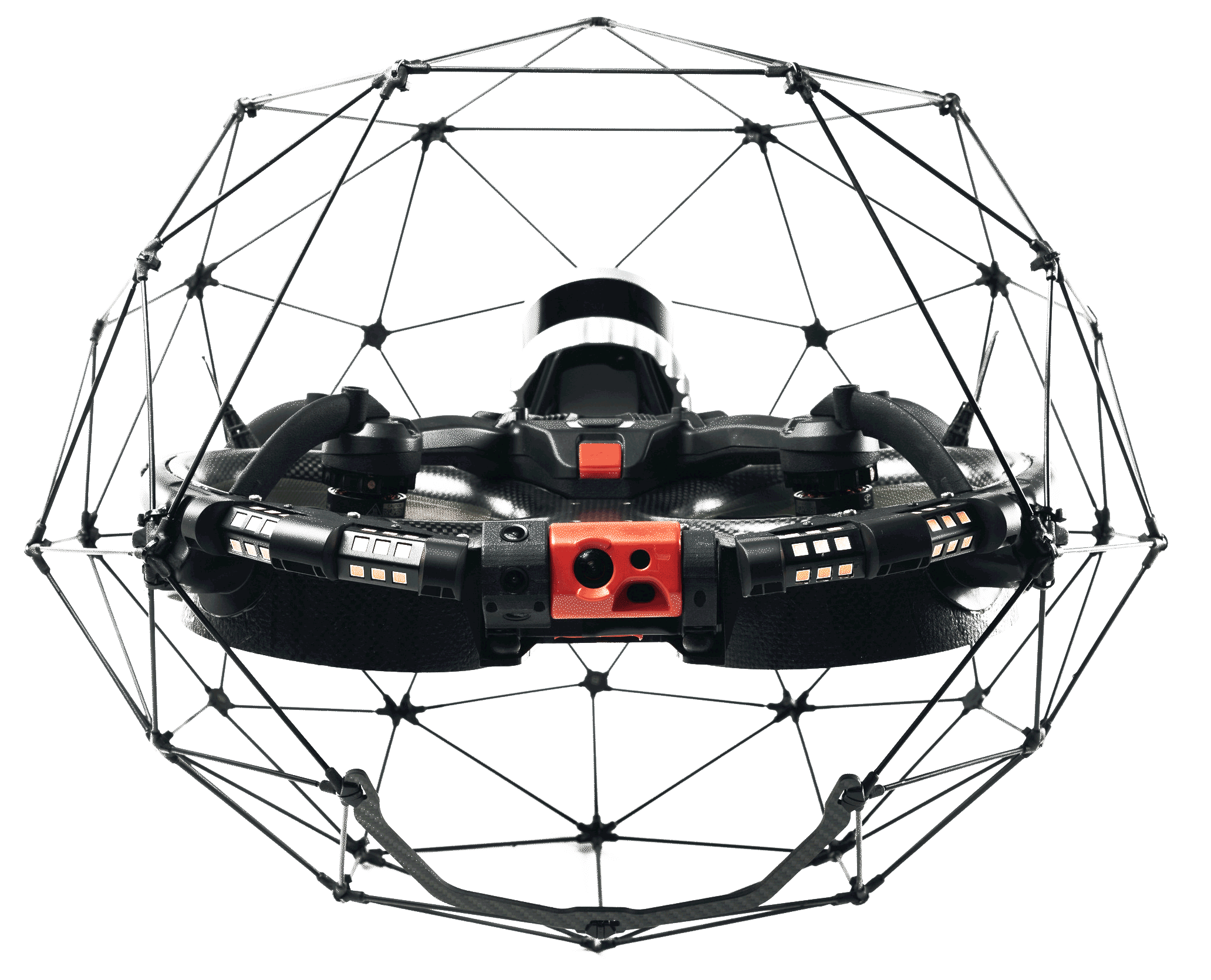







ZEB Revo RT-C
-
GEOSLAM RT-C采用了3D移动地图技术扫描技术,可实现走到哪扫到哪,实时处理和跟踪你的扫描进度。SLAM RT-C依旧为手持作业,最大的特点在于属于轻量级和易于使用,ZEB REVO RT-C可以使您在移动过程中,通过几分钟内快速建立高度精确的3D模型。
REVO RT-C完整的解决方案,可让您在走路的时候,同时扫描,观察和处理。可让您通过任何WiFi启用的设备实时的看到点云世界之美。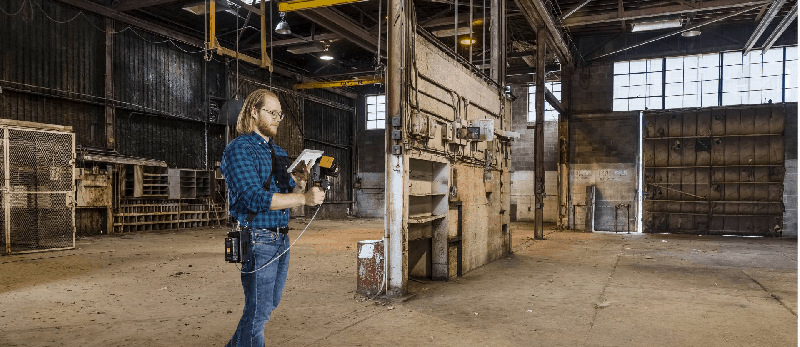
应用
ZEB-REVO是基于其前身,经过认可和授予的ZEB1而创建的,具有更快的扫描仪,操作更简单,功能更多。 它基于市场领先的GeoSLAM算法,即同步定位和映射(SLAM),可以在不需要GPS的情况下实现封闭环境的快速动态映射。 这种多功能性使ZEB-REVO适用于各种各样的应用,否则使用传统的提升技术很难或很慢。
建筑设计
地下工程
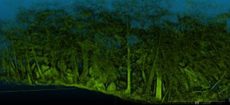
林业调查
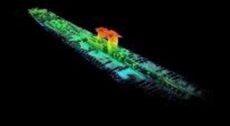

船舶
公共安全
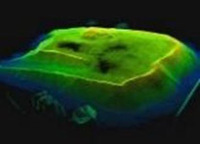
堆体测量
改善了性能
额外的多功能性:由于传感器头的自动旋转,ZEB-REVO可以手持,但也可以用于测量杆,背包或自动驾驶汽车
高分辨率:ZEB-REVO的速度为100Hz,扫描线数比ZEB1高2.5倍,结构更均匀,点云更均匀
更适中:ZEB-REVO仅需一只手且尺寸小,可提供出色的提升操作
最佳精度:高分辨率有助于改善环境特性的提取,因此只需一个闭环即可在SLAM寄存器中实现更高的自动精度

软件
移动测绘软件
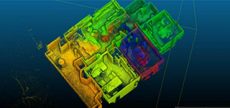
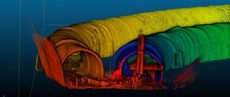
将3D扫描数据转换为可操作的信息
GeoSLAM Hub&Draw是一个全面的软件套件,可在几分钟内将3D点云数据转换为可操作的信息和有价值的可交付成果。
作为GeoSLAM完整移动映射解决方案的一部分,GeoSLAM Hub&Draw将业界领先的SLAM(同步定位和映射)技术与强大的后处理功能结合在一起,提供完整的端到端解决方案。
软件功能
-
业界领先的SLAM处理,可从移动数据生成准确的3D点云
-
自动注册多个扫描和数据集的地理参考以进行控制
-
导入,查看和查询从所有GeoSLAM移动映射设备捕获的数据
-
生成简单快速的3D测量和2D CAD交付
-
轻松导出数据,以便与所有主要的第三方CAD和GIS软件包一起使用
-
与全球多个利益相关方共同发布,分享和协作
-
-




